

rotabench® EPS/CT
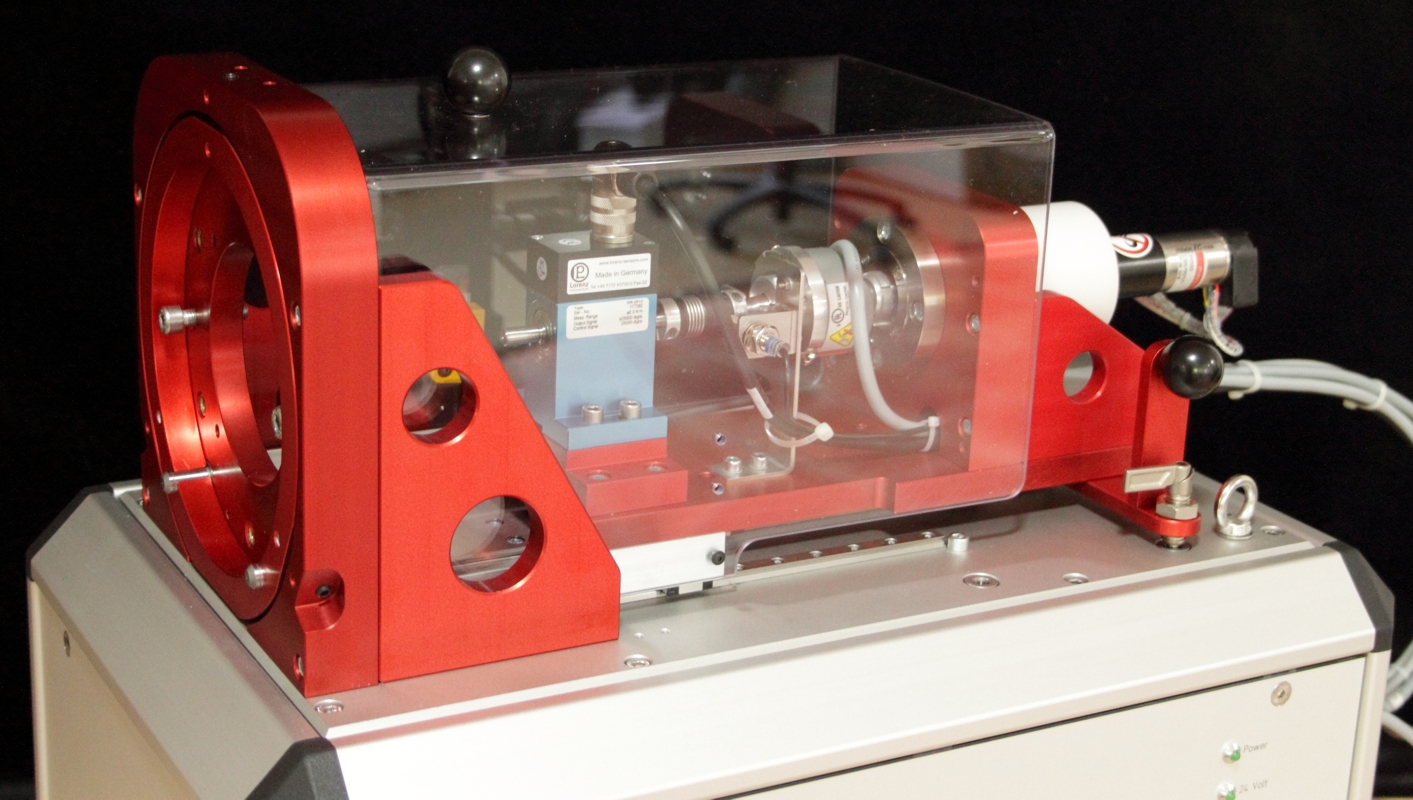
Der rotabench® EPS/CT Prüfstand ist ein Präzisions-Messgerät für Rastmoment-Messungen an permanenterregten Synchronmotoren (PSM) und vergleichbaren Motoren. Er wurde für Messungen an E-Maschinen für elektrische Lenkantriebe (EPS – Electric Power Steering) entwickelt und optimiert, kann aber auch für alle anderen Motoren-Typen verwendet werden.
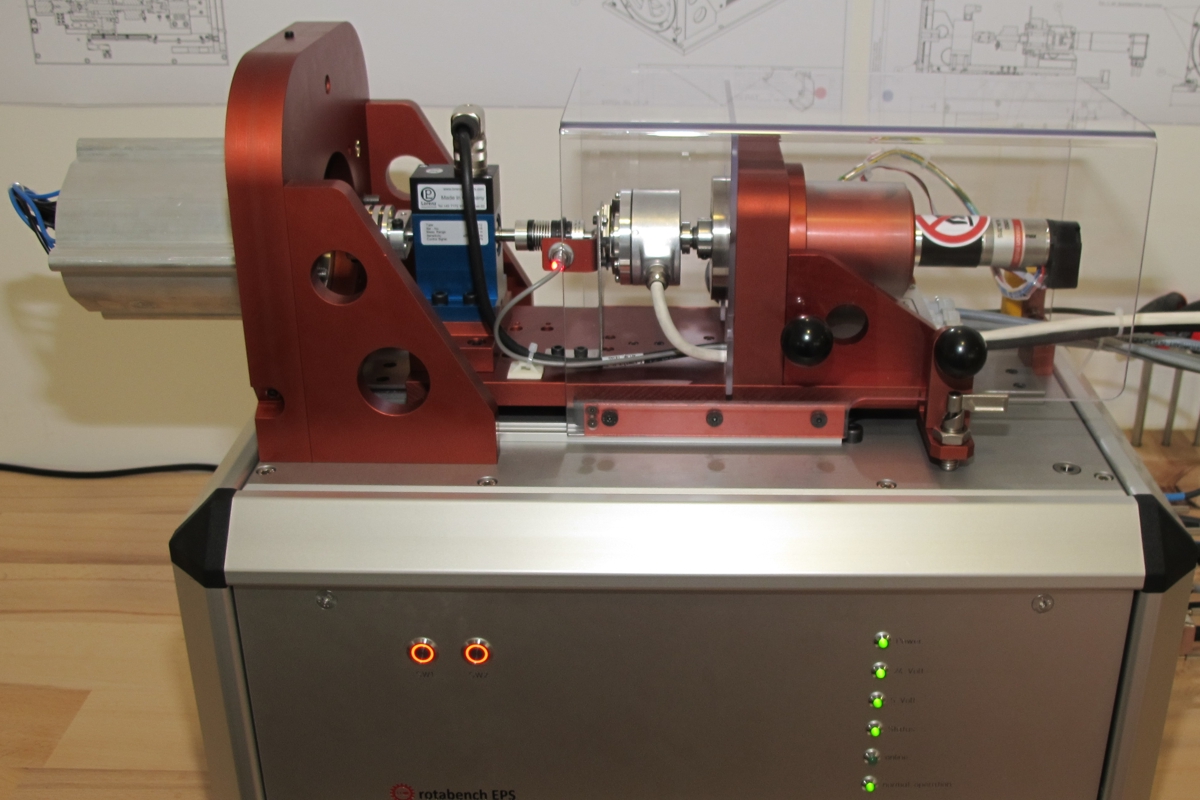
Der Prüfstands-Aufbau besteht aus verschraubtem und verstiftetem eloxiertem Aluminium (rot und natur), einem Maxon DC-Motor als Antrieb mit einer Leistung von ca. 100 Watt, einem Hohlwellen-Encoder mit 2048 Strichen pro Umdrehung und einer Lorenz-Messwelle in dem Messbereich 0.1 Nm oder 0.2 Nm, auf Wunsch auch 0.3, 0.5 Nm bzw. 1 Nm.















Technische Beschreibung
- Drehzahl: max. ± 120 U/min mit Standard-Motor
- Drehmoment ( Messwelle): ± 0.1 Nm (alternativ: 0.2 Nm, 0.3 Nm, 0.5 Nm, oder 1 Nm möglich)
- Gewicht: 40 kg incusive Elektronik (Tischgerät)
- Antrieb: Maxon DC Motor mit vorgespanntem Keramik-Getriebe für maximalen Gleichlauf
- Flansch-Durchmesser: 169.9 mm
- Encoder: 2048 Striche
- max. Sample-Rate: 5 kHz (theoretisch max. ~ 120 rpm mit voller Auflösung mit 2048 SpU)
- Controller: NI cRIO 9063
Software










Der rotabench® EPS/CT Prüfstand ist ein Mess-System für Rastmoment-Messungen, bestehend aus der rotabench® EPS/CT Hardware (dem Mess-Gerät) und der rotabench® Bedien-Software, die auf einem handelsüblichen Windows-PC betrieben wird. Die Verbindung zwischen der Client-Software und dem Messgerät erfolgt über TCP/IP (Gigabit Ethernet), so dass auch ein verteilter Aufbau von Messwert-Erfassung und Bedien-Rechner möglich ist.
Der Prüfling wird mit Hilfe eines Standard-Flansches (Zentrierung über den Außen-Durchmesser D=169,9 mm +-0,02) an den Prüf-Aufbau angeflanscht und mit einer möglichst drehsteifen Kupplung (z.B. BSD-Thomas-Kupplung) an den Abtrieb der Messwelle angekuppelt. Zur Messung wird der Prüfling durch den Antrieb passiv gedreht. Dabei wird durch den Inkrementalgeber getriggert das Moment über dem Verdrehwinkel aufgezeichnet. Der Schlitten mit dem Prüf-Aufbau (Messwelle, Encoder, Antrieb) kann auf einer Linearführung nach vorne (Richtung Prüflings-Ständer) und nach hinten verschoben werden, zum einen um eine leichte Montage zu ermöglichen, zum anderen um den Abstand zwischen Prüflings-Welle und Messwelle anpassen zu können.
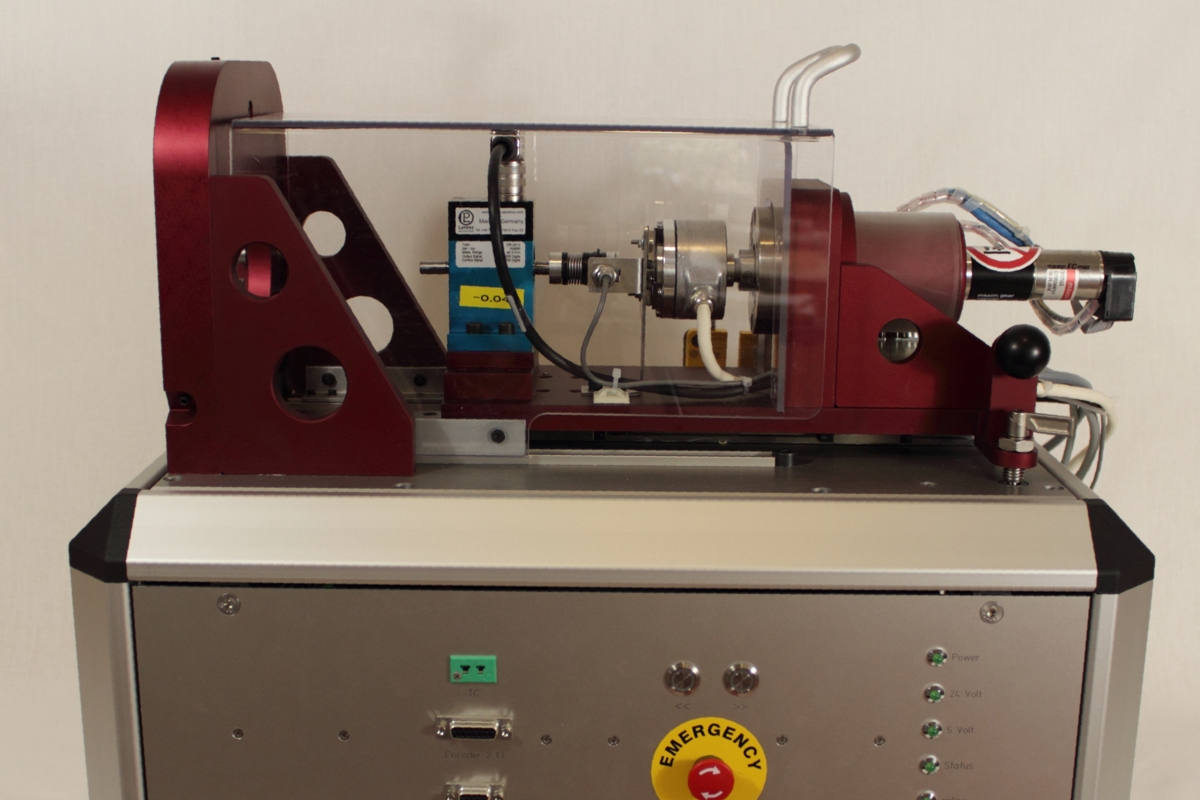
Alle rotierenden Teile sind durch eine Schutzhaube aus Plexiglas geschützt, die Position der Schutzhaube wird durch einen Sicherheits-Schalter, das an ein Sicherheits-Relais angeschlossen ist, abgefragt, das den Antrieb erst dann wieder freigibt, wenn die Schutzhaube geschlossen ist. Zur Positionierung (im Einricht-Betrieb) kann der Antrieb über 2 Druck-Taster bei geöffneter Schutzhaube langsam gedreht werden, z.B. um die Kupplung zwischen Prüfling und Messwelle in eine geeignete Montage-Position zu bringen.
Bei der Rastmoment-Messung wird der Prüfling langsam gedreht (max. 120 U/min) und über die Drehung winkelsynchron, durch den Inkrementalgeber getriggert, das Moment aufgezeichnet (M von phi).
Die Messung wird vom Z-Impuls des Encoders gestartet um sicherzustellen, dass sowohl im Links- als auch im Rechtslauf die Messwert-Erfassung immer an der gleichen Winkelposition beginnt. Dadurch ist es möglich Links- und Rechtslauf direkt miteinander zu vergleichen.
Unmittelbar nach Abschluss der Messdaten-Erfassung werden die Ergebnisse berechnet. Mit Hilfe parametrierbarer Ordnungs-Filter kann ein Messdaten-Satz mehrfach ausgewertet werden, z.B. um das Gesamt-Signal zu zerlegen und bestimmte (ausgewählte) Ordnungen getrennt voneinander zu betrachten. Für jeden Filter-Satz können unterschiedliche Grenzwerte angegeben werden, das Gesamt-Ergebnis (IO, NIO) wird aus den Ergebnissen der Teil-Auswertungen gebildet und steht unmittelbar nach dem Prüflauf zur Verfügung. Die Filter- und Auswerte-Einstellungen werden ebenfalls im Prüf-Rezept gespeichert, das zu einem späteren Zeitpunkt wieder geladen werden kann.
Standardmäßig können die Messdaten und –Ergebnisse in eine CSV-Datei exportiert werden, bzw. als Daten im CSV-Format in die Zwischenablage kopiert werden, um sie in anderen Anwendungen zu nutzen.
Als Alternative zum CSV-Export kann ein Prüf-Report im PDF-Format erzeugt werden.
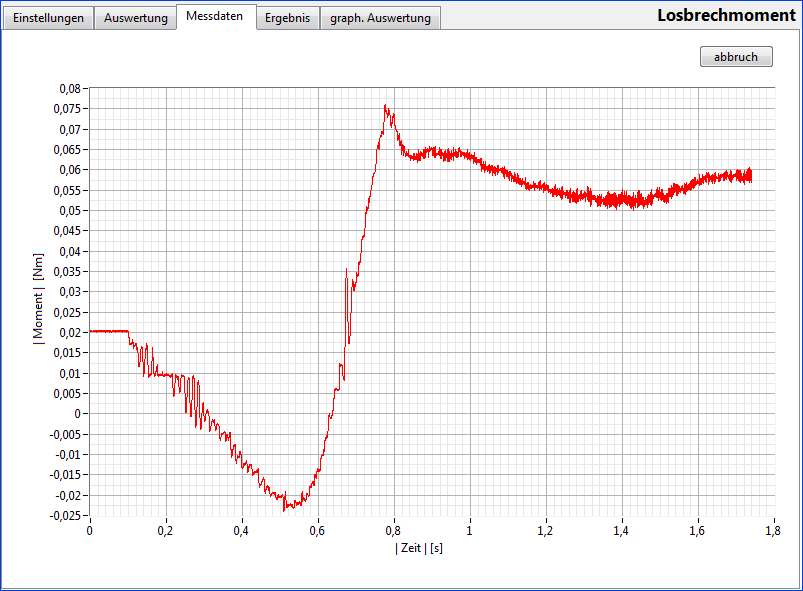
Unter Umständen kann es auch relevant sein das Moment zu Messen, das in dem Zeitpunkt auftritt zu dem sich der Prüfling in Bewegung setzt. Da die Rastmoment-Messung immer durch den Z-Impuls des Drehgebers gestartet wird, wird dieser Teil des Momenten-Verlaufs zwangsläufig abgeschnitten. Aus diesem Grund verfügt die rotabench® Software über eine Mess-Funktion mit der auch das Losbrechmoment ermittelt werden kann.
Im Gegensatz zur Rastmoment-Messung wird die Messdaten-Erfassung bereits gestartet bevor sich der Prüfling in Bewegung setzt. Zur Ermittlung des Losbrechmoments werden sowohl der Verdreh-Winkel über der Zeit als auch der Momentenverlauf über dem Winkel zur Berechnung herangezogen.
Das Losbrechmoment ist der Maximalwert des Momentes, der innerhalb eines parametrierbaren Verdrehwinkels auftritt. Ausgewertet wird:
- maximales Moment
- Breite des Peaks
- Position des Peaks (Winkel)
- Ende des Losbrech-Bereichs (Winkel)
- Reibmoment (Mittelwert des Momentes nach „Abklingen“ des „Losbrech-Peaks“)
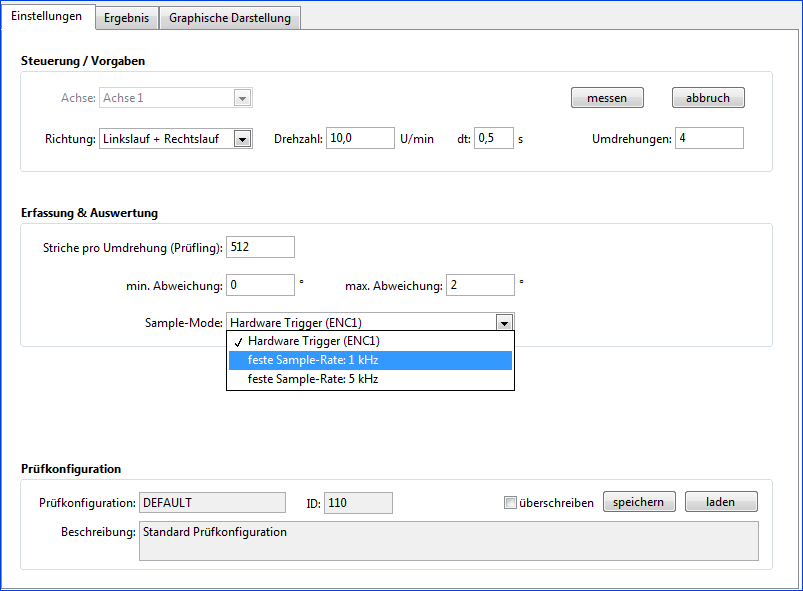
Die Messfunktion „Encoder-Test“ (optional, abhängig von der Software-Lizenz) dient dazu einen Winkelsensor zu prüfen. Für die Prüfung wird der Prüfling am Prüflings-Ständer angeflanscht und mit einer Kupplung mit der Messwelle verbunden.
Während der Prüfung wird das Signal des Prüflings aufgezeichnet, der Prüfstands-Encoder dient als Referenz.
Ausgewertet wird die maximale Winkel-Abweichung und die Abweichung über eine volle Umdrehung.
Download: Prospekt / Technische Beschreibung